4. Optimization#
Learning outcome
Under which conditions are we guaranteed an optimal solution to an optimization problem?
Write down the gradient descent update equation and explain each term.
Explain how momentum and higher-order optimization methods help and when they might not be suitable.
What is derivative-free optimization, and when is it used?
In the lecture on Linear Models, we already saw the main building blocks of a supervised learning algorithm:
Model \(h\) of the relationship between inputs \(x\) and outputs \(y\),
Loss (aka Cost, Error) function \(J(\vartheta)\) quantifying the discrepancy between \(h_{\vartheta}(x^{(i)})\) and \(y^{(i)}\) for each of the measurement pairs \(\left\{(x^{(i)}, y^{\text {(i)}})\right\}_{i=1,...m}\), and
Optimization algorithm (aka Optimizer) minimizing the loss.
Point 1 is a matter of what we know about the world in advance and how we include that knowledge into the model, e.g., choose CNNs when working with images because the same pattern might appear at different locations of an image. Later in the lecture, we will look at different models each of which is by construction better suited for different problem types. After selecting a model \(h_{\vartheta}\), points 2 and 3 are critical to the success of the learning as the loss function (point 2) defines how we measure success, and the optimizer (point 3) guides the process of moving from a random initial guess of the parameters to a parameter configuration with a smaller loss. These two points are the topic of this lecture and the lecture Tricks of Optimization.
Note: all algorithms discussed below assume an unconstrained parameter space, i.e. \(\vartheta \in \mathbb{R}^n\). There are dedicated algorithms for solving constrained optimization problems, e.g., \(a \le \vartheta \le b\), but these are beyond the scope of our lecture.
4.1. Basics of Optimization#
First, we define the general (unconstrained) minimization problem
where \(J:\mathbb{R}^n \rightarrow \mathbb{R}\) is a real-valued function. We call the optimal solution of this problem the minimizer of \(J\) and denote it as \(\vartheta_{\star}\). The minimizer is defined as \(J(\vartheta_{\star}) \le J(\vartheta)\) for all \(\vartheta\). If the relation \(J(\vartheta_{\star}) \le J(\vartheta)\) holds only in a local neighborhood \(||\vartheta - \vartheta_{\star}|| \le \epsilon\), for some \(\epsilon>0\), then we call \(\vartheta_{\star}\) a local optimizer. In the figure below, we see an example of different loss functions.
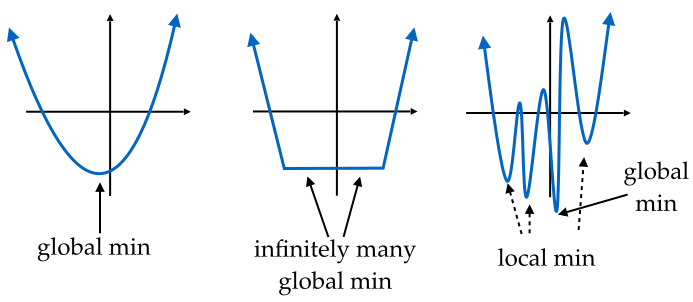
Fig. 4.1 Function with (left) one global minimum, (middle) infinitely many global minima, and (right) multiple local as well as one global minimum (Source: [Hardt and Recht, 2022], Chapter 5).#
4.1.1. Convexity#
Convexity is a property of a function and has a simple geometric meaning. If the function \(J\) fulfills the following inequality
then \(J\) is said to be convex. Geometrically, this inequality implies that a line segment between \((\vartheta_l, J(\vartheta_l))\) and \((\vartheta_r, J(\vartheta_r))\) lies above the graph of \(J\) in the range \((\vartheta_l, \vartheta_r)\).
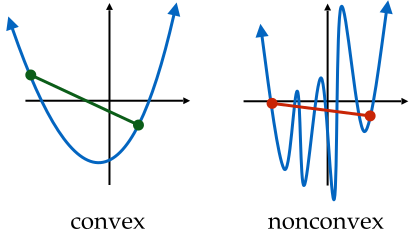
Fig. 4.2 Example of convex and nonconvex functions (Source: [Hardt and Recht, 2022], Chapter 5).#
There is exhaustive literature on convex functions and convex optimization, e.g. [Boyd and Vandenberghe, 2004], due to the mathematical properties of such functions. An important result from this theory is that gradient descent is guaranteed to find an optimum of a convex function. Two examples of convex functions are the Least Mean Square loss in linear regression and the negative log-likelihood in logistic regression. However, modern deep learning is, in general, non-convex. Thus, we optimize towards a local minimum in the proximity of an initial configuration.
Note: Convexity is a property of the loss \(J(\vartheta)\) w.r.t. \(\vartheta\). This means that for \(J(\vartheta)\) to be convex, the combination of model and loss functions has to result in a convex function in \(\vartheta\).
Obviously, the choice of \(h(x)\) plays an essential role in the shape of \(J(\vartheta)\), but how does the choice of loss function influence \(J\)?
4.1.2. Cost Functions#
We will discuss extensions of the loss function in the lecture Tricks of Optimization. For now, we give an example of common loss functions by problem type:
Regression loss
L1 loss: \(\; \; \; J(h_{\vartheta}(x), y)=1/m \sum_{i=1}^m |y-h_{\vartheta}(x)|\)
MSE loss: \(J(h_{\vartheta}(x), y)=1/m \sum_{i=1}^m (y-h_{\vartheta}(x))^2\)
Classification loss
Cross Entropy loss \(J(h_{\vartheta}(x),y)= -\sum_{i=1}^m\sum_{k=1}^K(y_{ik}\cdot \ln h_{\vartheta, k}(x_i))\)
4.2. Gradient-based Methods#
If we now consider the functions from Fig. 4.1 as highly simplified objective functions that we want to minimize, then we see that the gradient descent method we saw in lecture Linear Models is well suited. While being the obvious choice for the two cases on the left, the picture becomes slightly muddier in the example on the right.
Notation alert: For deriving the gradient-based optimization techniques, we use the notation by which the function we want to find the minimum of becomes \(J \rightarrow f\) and the variable \(\vartheta \rightarrow x\). Don’t confuse this \(x\) with the data pairs \(\{x^{(i)},y^{(i)}\}_{i=0,...,m}\).
4.2.1. Gradient Descent#
While a foundational concept, gradient descent is rarely used in its pure form but mostly in its stochastic form. If we first consider it in its most foundational form in 1-dimension, then we can take a function \(f\) and Taylor-expand it to
Then, our intuition would dictate that moving a small \(\varepsilon\) in the direction of the negative gradient will decrease \(f\). Taking a step size \(\eta > 0\) and using our ability to freely choose \(\varepsilon\) to set it as
to then be plugged back into the Taylor expansion, leads to
Unless our gradient vanishes, we can then minimize \(f\) as \(\eta f'^{2}(x)>0\). Choosing a small enough \(\eta\) can then make the higher-order terms irrelevant to arrive at
I.e.
is the right algorithm to iterate over \(x\) s.t. the value of our (objective) function \(f(x)\) declines. We hence end up with an algorithm in which we have to choose an initial value for \(x\), a constant \(\eta > 0\), and then continuously iterate \(x\) until we reach our stopping criterion. \(\eta\) is most commonly known as our learning rate and has to be set by us. Now, if \(\eta\) is too small, \(x\) will update too slowly and require us to perform many more costly iterations than we’d ideally like to. But if we choose a learning rate that is too large, then the error term \(\mathcal{O}(\eta^{2}f'^{2}(x))\) at the back of the Taylor-expansion will explode, and we will overshoot the minimum. Now, if we take a non-convex function for \(f\), which might even have infinitely many local minima, then the choice of our learning rate and initialization becomes even more important. Take the following function \(f\) for example:
Then the optimization problem might end up looking like the following:
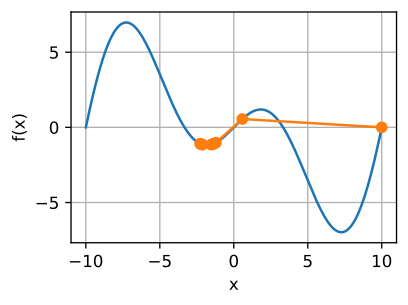
Fig. 4.3 Optimizing \(f(x) = x \cdot \cos(cx)\) (Source: [Zhang et al., 2021], here).#
\(x\) as vector
If we now consider the case where we do not only have a one-dimensional function \(f\) but instead a function s.t.
i.e., a vector is mapped to a scalar, then the gradient is a vector of \(d\) partial derivatives
with each term indicating the rate of change in each of the \(d\) dimensions. Then, we can use the Taylor approximation as before and derive the gradient descent algorithm for the multivariate case given by
If we then construct an objective function such as
then our optimization could take the following shape.
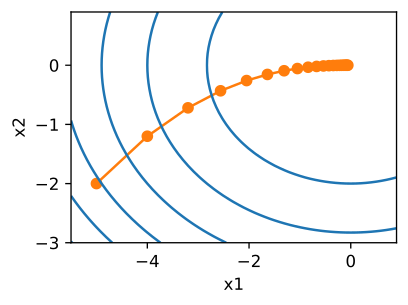
Fig. 4.4 Optimizing \(f({\bf{x}}) = x_{1}^{2} + 2 x_{2}^{2}\) (Source: [Zhang et al., 2021], here).#
Having up until now relied on a fixed learning rate \(\eta\), we now want to expand upon the previous algorithm by adaptively choosing \(\eta\). For this, we have to go back to Newton’s method. For this, we have to further expand the initial Taylor expansion to the third-order term as
If we now look closer at \(\nabla^{2} f({\bf{x}})\), sometimes also called the Hessian, then we recognize that for larger problems, this term might be infeasible to compute due to the required \(\mathcal{O}(d^{2})\) computations. Following the condition \(\nabla_{\epsilon} f(\bf{x} + \epsilon)=0\) for the minimum to calculate \(\varepsilon\), we then arrive at the ideal value of
I.e. we need to invert \(\nabla^{2} f({\bf{x}})\), the Hessian. Computing and storing this important array turns out to be really expensive! To reduce these costs we are looking towards the preconditioning of our optimization algorithm. For preconditioning, we then only need to compute the diagonal entries, hence leading to the following update equation:
What the preconditioning then achieves is to select a specific learning rate for every single variable.
4.2.1.1. Momentum#
If we now have a mismatch in the scales of two variables contained in our objective function, then we end up with an unsolvable optimization problem. To solve it, we require the momentum method
with gradients of the loss \(\mathbf{g}_t = \nabla f_t(x)\) and the momentum variable \(\mathbf{v}_t\). The momentum \(\mathbf{v}_t\) accumulates past gradients resembling how a ball rolling down a hill integrates over past forces. For \(\beta=0\), we then have the regular gradient descent update. To now choose the perfect, effective sample weight, we have to take the limit of
Taking the limit \(t \to \infty\) results in the geometric series solution
Hence using the momentum GD results in a step size \(\frac{\eta}{1 - \beta}\), which simultaneously gives us much better gradient descent directions to follow to minimize our objective function.
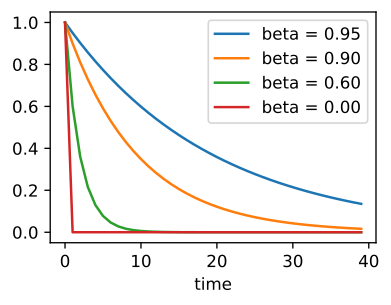
Fig. 4.5 Momentum parameter (Source: [Zhang et al., 2021], here).#
4.2.2. Adam#
The Adam algorithm then extends beyond traditional gradient descent by combining multiple tricks into a highly robust algorithm, which is one of the most often used optimization algorithms in machine learning. Expanding upon the previous use of momentum, Adam further utilizes the 1st and 2nd momentum of the gradient, i.e.
where both \(\beta_{1}\), and \(\beta_{2}\) are non-negative. A typical initialization here would be something along the lines of \(\beta_{1} = 0.9\), and \(\beta_{2} = 0.999\) s.t. the variance estimate moves much slower than the momentum term. As an initialization of \({\bf{v}}_{0} = {\bf{s}}_{0} = 0\) can lead to bias in the optimization algorithm towards small initial values, we have to re-normalize the state variables with
The Adam optimization algorithm then rescales the gradient to obtain
The updated equation for Adam becomes
The strength of the Adam optimization algorithm is the stability of its update rule.
If the momentum GD algorithm can be understood as a ball rolling down a hill, the Adam algorithm behaves like a ball with friction (see GANs Trained by a Two Time-Scale Update Rule Converge to a Local Nash Equilibrium).
Fig. 4.6 Comparison of 1st order optimization algorithms (Source: github.com/Jaewan-Yun/optimizer-visualization).#
Recent developments in optimizer development include AdEMAMix, SOAP, and Schedule-Free.
4.2.3. Stochastic Gradient Descent#
In machine learning, we could take the loss across an average of the entire training set. Writing down the objective function for the training set with \(n\) entries leads to
Here, \(f_i\) refers to evaluating the loss for training sample \(i\), and \(\bf{x}\) denotes the model parameter vector. The gradient of the objective function is then
With the cost of each independent variable iteration being \(\mathcal{O}(n)\) for gradient descent, stochastic gradient replaces this with a sampling step where we uniformly sample an index \(i \in \{1, \ldots, n\}\) at random, and then compute the gradient for the sampled index and update \({\bf{x}}\)
With this randomly sampled update, the cost for each iteration drops to \(\mathcal{O}(1)\). Due to the sampling, we now have to think of our gradient as an expectation, i.e., by drawing uniform random samples, we are essentially creating an unbiased estimator of the gradient being
Looking at an example stochastic gradient descent optimization process in Fig. 4.7, we come to realize that the stochasticity induces too much noise for our chosen learning rate. To handle that, we later introduce learning rate scheduling.
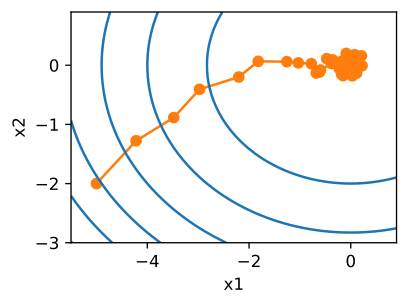
Fig. 4.7 SGD trajectory (Source: [Zhang et al., 2021], here).#
4.2.3.1. Minibatching#
For data that is very similar, gradient descent is inefficient, whereas stochastic gradient descent relies on the power of vectorization.
The answer to these ailments is using minibatches to exploit the memory and cache hierarchy a modern computer exposes to us. In essence, we seek to avoid the many single matrix-vector multiplications to reduce the overhead and improve our computational cost. If we compute the gradient in stochastic gradient descent as
then, for computational efficiency, we will now perform this update in its batched form
As both \(\bf{g}_t\) and \(i\) are drawn uniformly at random from the training set, we retain our unbiased gradient estimator. For size \(b\) of the dataset, i.e. \(b = | \mathcal{B}_{t} |\) we obtain a reduction of the standard deviation by \(b^{-\frac{1}{2}}\), while this is desirable we should in practice choose the minibatch-size s.t. our underlying hardware gets utilized as optimally as possible.
4.3. Second-Order Methods#
With first-order methods only taking the gradient itself into account, there is much information we are leaving untapped in attempting to solve our optimization problem, such as gradient curvature for which we’d need 2nd order gradients. The reason for that is, in part, historic, automatic differentiation (to be explained in-depth in a later lecture) suffers from an exponential compute-graph blow-up when computing higher-order gradients. The automatic differentiation engines, the first popularized machine learning engines from AlexNet, LeNet, etc., were built on, could not handle higher-order gradients for the above reason, and only modern automatic differentiation engines have been able to circumvent that problem. As such 2nd-order gradient methods have seen a recent resurgence with methods like Shampoo, RePAST, and Fishy.
4.3.1. Newton’s method#
(also Newton-Raphson method)
A first example of the step toward second-order methods is the Newton method. It is an iterative method to find a zero of a differentiable function defined as \(f: \mathbb{R} \rightarrow \mathbb{R}\). The Newton-method begins with an initial guess \(x_{0}\) to then iteratively update with
Graphically speaking, this amounts to the case of the tangent line of the function intersecting with the x-axis.
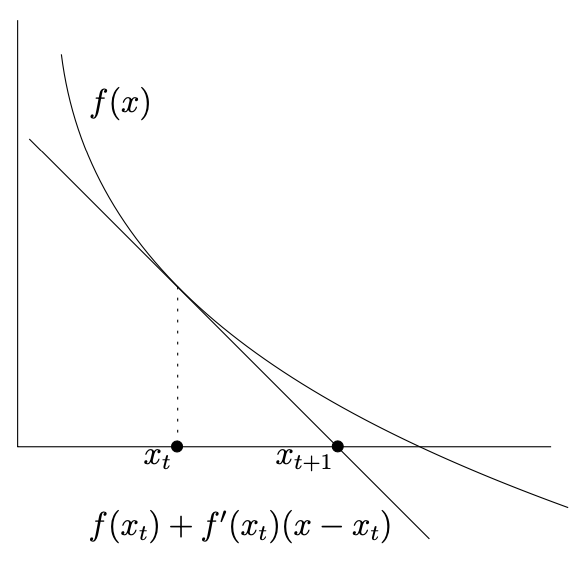
Fig. 4.8 Newton’s method (Source: [Gärtner and Jaggi, 2023], Chapter 7).#
The fallacies of this method are the cases where \(f'(x_{t}) = 0\), and it will diverge when \(|f'(x_{t})|\) is very small. Going beyond the first-order update, we can then utilize the second-order gradient if our (objective) function \(f\) is twice differentiable. Hence turning the update step into
Generalizing this update scheme in notation, we can use vector calculus to obtain
\(\nabla^{2} f(x_{t})^{-1}\) constitutes the inverse of the Hessian at \(x_{t}\). As alluded to earlier, the failure modes can then be formalized in the following fashion:
The Hessian is not invertible.
Gets out of control if the Hessian has a small norm.
If we further generalize the notation to a general update scheme
then we can simplify this update scheme to the gradient descent we already encountered in the last lecture by setting \(\tilde{H}(x_{t}) = \gamma I\), where \(I\) is the identity matrix. With \(\tilde{H}=\nabla^2f(x)^{-1}\) we recover Newton’s method. Newton’s method hence constitutes an adaptive gradient descent approach, where the adaptation happens with respect to the local geometry of the objective function at \(x_{t}\).
Where gradient descent requires the right step size, Newton’s method converges naturally to the local minimum without requiring step-size tuning.
To expand upon this, assume we have a linear system of equations
then Newton’s method can solve this system in one step, whereas gradient descent requires multiple steps with the right chosen step size. The downside to this is the expensive step of inverting matrix \(M\). In our general case, this means we need to invert the expensive matrix \(\nabla^{2} f(x_{0})\). Another advantage of Newton’s method is that it does not suffer from individual coordinates being at completely different scales, e.g., the \(y\)-direction changes very fast, whereas the \(z\)-direction only changes very slowly. Gradient descent only handles these cases suboptimally, whereas Newton’s method does not suffer from this shortcoming.
Note: The Hessian has to be positive definite, otherwise we would end up in a local maximum.
A matrix \(H\) is positive definite if the real number \(z^{\top} H z\) is positive for every nonzero real-valued vector \(z\).
4.3.2. The Quasi-Newton Approach#
With the main computational bottleneck of Newton’s approach being that the inversion of the Hessian matrix costs \(\mathcal{O}(d^{3})\) for a matrix of size \(d \times d\), there exist multiple approaches that try to circumvent this costly operation.
4.3.2.1. The Secant Method#
The secant method is an alternative to Newton’s method, which consciously does not use derivatives. Hence, it has much less stringent requirements on our objective function, such as it not needing to be differentiable. We can replace the derivative in Newton’s method with the finite difference approximation, i.e.
for a small region around \(x_{t}\). The secant update step then takes the following form
to approximate the Newton step at the detriment of having to choose two starting values \(x_{0}\), and \(x_{1}\) here. Figuratively speaking, the approach looks like this:
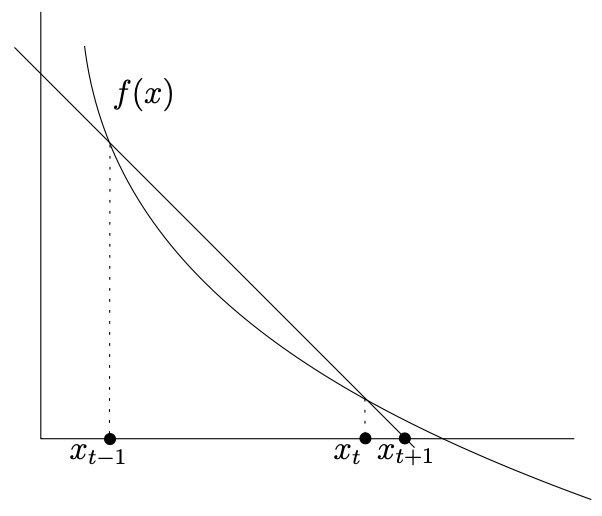
Fig. 4.9 Secant method (Source: [Gärtner and Jaggi, 2023], Chapter 8).#
What this approach then does is to construct the line through the two points \((x_{t-1}, f(x_{t-1}))\), and \((x_{t}, f(x_{t}))\) on the graph of f, the next iteration is then given by the point where the line intersects the x-axis. When our function is first-order differentiable, we can also use the secant method to derive a second-derivative-free version of Newton’s method for optimization.
4.3.2.2. Quasi-Newton Methods#
If we consider the so-called secant condition, then we have the following approximation
then the secant method works with the following update step using the above approximation
For this approximation to hold, we need to satisfy the secant condition
Or generalized to higher dimensions as
Whenever this condition is now fulfilled in conjunction with a symmetric matrix, then we have a Quasi-Newton method. As our matrix \(H_{t} \approx \nabla^{2}f(x_{t})\) only fluctuates very little during periods of very fast convergence, and Newton’s method is optimal with one step, then we can presume
and equally as much
then we can (following Greenstadt’s approach) model \(H_{t}\) in the following fashion
I.e., our matrix \(H_{t}\), the Hessian, only changes by a minor error matrix \(E_t\). These errors should also be as small as possible.
4.3.2.3. BFGS#
(Broyden–Fletcher–Goldfarb–Shanno)
For the BFGS algorithm, this update matrix then assumes the form
where we simplified notation to \(H=H_{t-1}^{-1}\), \({\bf{\sigma}} = x_{t} - x_{t-1}\), and \(y = \nabla f(x_{t}) - \nabla f(x_{t-1})\). One of the core advantages of BFGS is that if \(H':=H_{t}^{-1}\) is positive definite, then the update \(E\) maintains this positive definite attribute and, as such, behaves like a proper inverse Hessian. In addition, the cost of computation drops from the original \(\mathcal{O}(d^{3})\) for a matrix of size \(d \times d\) to \(\mathcal{O}(d^{2})\) for the BFGS approach. Scaling the update step, the individual iteration then becomes
where \(\alpha\) can be chosen such that a line search is performed, and where \(H_{t}^{-1}\) is the BFGS approximation. In a pseudo-algorithmic form, this then looks the following way:
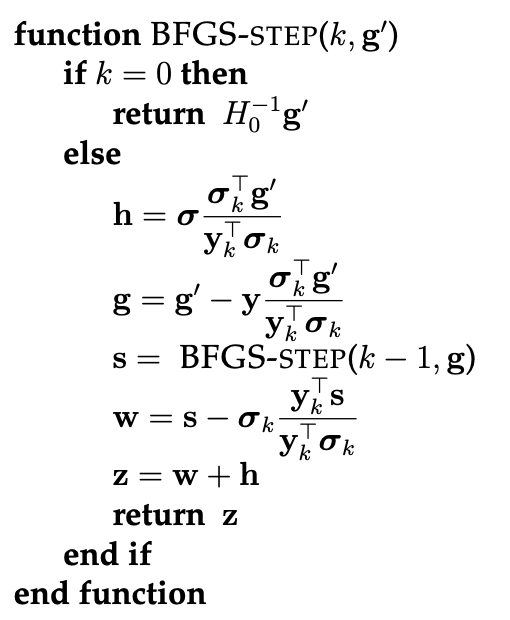
Fig. 4.10 BFGS algorithm (Source: [Gärtner and Jaggi, 2023], Chapter 8).#
4.3.2.4. L-BFGS#
(Limited-memory BFGS)
Especially in high dimensions, a cost of \(\mathcal{O}(d^{2})\) may still be too prohibitive. Only using information from the past \(m\) iterations for \(m\) being a small value, L-BFGS then approximates the entire \(H'\nabla f(x_{t})\) term. L-BFGS then builds on modeling \(H'\) as
Then, we can utilize an oracle to compute
for any vector \(g\). Then \(s' = H'g'\) can be computed with one oracle call and \(\mathcal{O}(d)\) additional arithmetic operations, assuming that \(\sigma\), and \(y\) are known. We then define \(\sigma\), and \(y\) in the following fashion
The L-BFGS algorithm is then given by
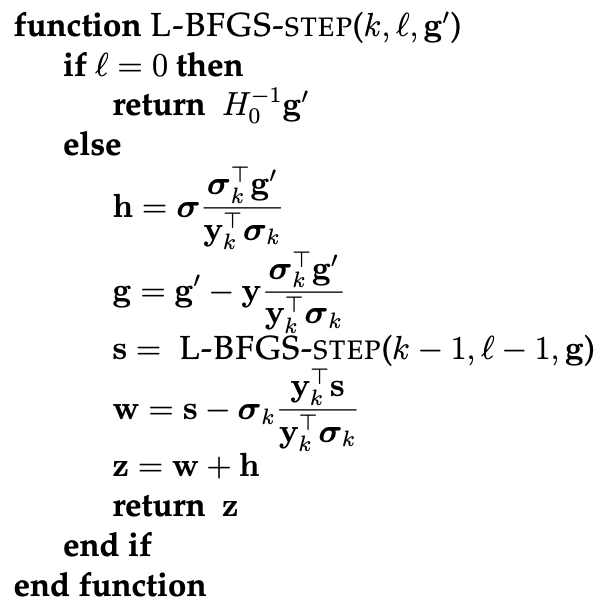
Fig. 4.11 L-BFGS algorithm (Source: [Gärtner and Jaggi, 2023], Chapter 8).#
where in the case of the recursion bottoming out prematurely at a point \(k=t-m\), then we pretend that we just started the computation at that point and use \(H_{0}\).
4.4. Derivative-Free Optimization (DFO)#
(also Blackbox optimizations)
If we cannot compute gradients for any reason, then we need to rely on derivative-free optimization (DFO). This is most commonly used in blackbox function optimization or discrete optimization.
If you as an engineer would have to optimize the design of some model given to you, but where you are not allowed to touch the code or even look at the code of the model, but only query it for outputs, then this would constitute a case of blackbox function optimization.
There exist several approaches for such problems, which all depend on the cost of evaluation of our function.
Expensive function
Bayesian optimization
Cheap function
Stochastic local search
Evolutionary search
In local search, for example, we replace the entire gradient update with
where \(nbr\) is the neighborhood of the point \(x_{t}\). This approach is also colloquially known as hill climbing, steepest ascent, or greedy search. In stochastic local search, we would then define a probability distribution over the uphill neighbors proportional to how much they improve our function and then sample randomly. A second stochastic option is to start again from a different random starting point whenever we reach a local maximum. This approach is known as random restart hill climbing. An effective strategy here is also random search, which should be the go-to baseline one attempts first when approaching a new problem. Here an iterate \(x_{t+1}\) is chosen uniformly at random from the set of iterates. An alternative, which has been proven to be less efficient (see Random Search for Hyper-Parameter Optimization by Bergstra and Bengio, 2012), is the grid search, which chooses hyperparameters equidistantly in the same range used for random search.
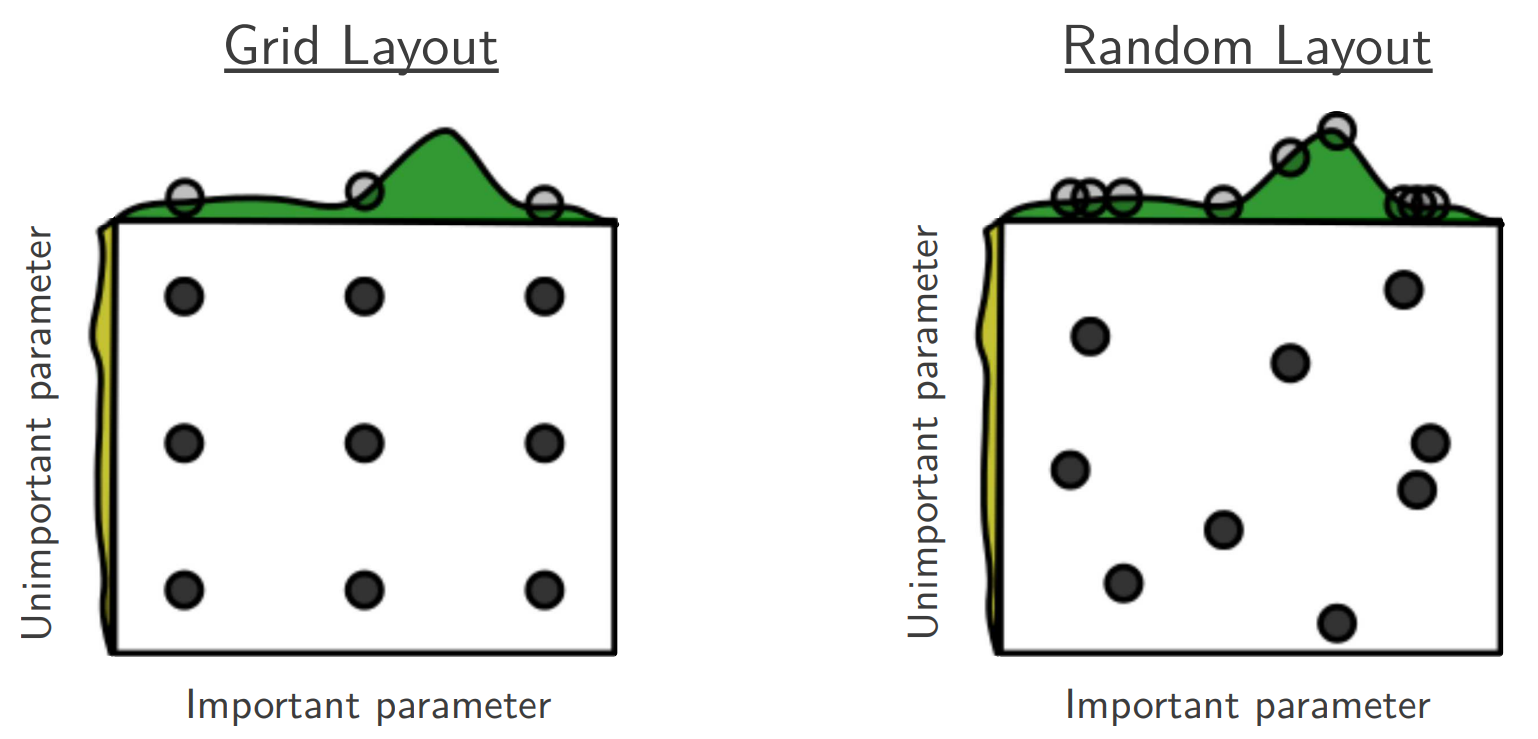
Fig. 4.12 Grid search vs random search (Source: Random Search for Hyper-Parameter Optimization).#
If instead of throwing away our “old” good candidates, keep them in a population of good candidates, then we arrive at evolutionary algorithms. Here we maintain a population of \(K\) good candidates, which we then try to improve at each step. The advantage here is that evolutionary algorithms are embarrassingly parallel and are, as such, highly scalable.
4.5. Further References#
Basics of Optimization
[Hardt and Recht, 2022], Chapter 5
[Boyd and Vandenberghe, 2004], Chapter 1
First-Order Optimization
[Hardt and Recht, 2022], Chapter 5
[Zhang et al., 2021], Chapter Optimization Algorithms
[Boyd and Vandenberghe, 2004], Chapter 9
An overview of gradient descent optimization algorithms, S. Ruder, 2016
Second-Order Optimization
[Gärtner and Jaggi, 2023], Chapters 7 and 8
[Nocedal and Wright, 2006], Chapters 3 and 6